
Our latest thoughts

Tesla Toybox: Every Feature You Can Unlock with K3Y
Your Tesla hides a whole menu of playful features called the Toybox—light shows, custom sounds, games, and more. While many of them are built right into the car, some of the most exciting ones let you add your own content....

Tesla Is Taking Dashcam Footage Seriously. K3Y Takes It Further.
Tesla has been quietly improving what your car does with the footage it records. Two recent updates stand out: your dashcam now holds on to footage for longer before overwriting it, and in update 2026.20 your clips are encrypted by...

OASISS, Micro-Parameters, and the Real Work of Safer Autonomy
ODDs describe the big picture of how an automated system is intended to operate. Real models fail on the small stuff. Micro-parameters, such as lighting angle, clothing reflectivity, lane-marking wear, or windshield glare, often determine whether perception and planning remain...

Smarter Dashcam, Smarter Driving: Why K3Y Changes the Game
For years, dashcams have been an afterthought—grainy video, clunky file review, and endless scrolling through footage just to find that one important clip. Tesla’s built-in dashcam viewer was a step forward, but it’s still limited: compressed video, no automatic tagging,...
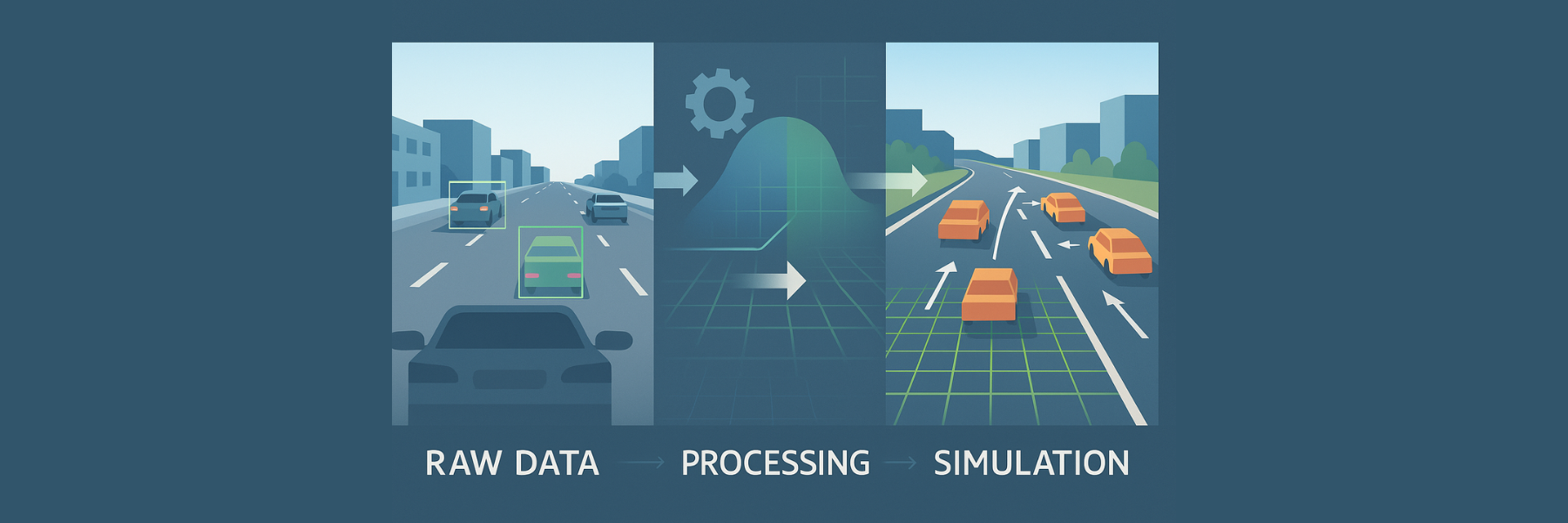
Navigating the Road to Autonomous Driving - Inside MATT3R’s Pipeline for Scenario Reconstruction
Introduction In the first part of this series, we explored why scenarios are central to advancing autonomous driving and driver assistance systems. The industry is gradually shifting away from purely mileage-based testing toward scenario-driven validation, where safety and performance are...
IAA MOBILITY 2025: Where Autonomy Gets Real
The world’s automotive spotlight turned to Munich this September as IAA MOBILITY 2025 brought together automakers, suppliers, and technology firms. While electric cars captured much of the mainstream attention, autonomy and driver assistance took a decisive step forward. The event...

Unlocking the Next Leap in Autonomous Driving with Foundation Models
How MATT3R’s Embodied AI Data Engine powers the future of scenario generation and analysis Published: June 2025 | Author: Hamid Abdollahi, CEO @ MATT3R Foundation Models (FMs) have redefined what’s possible across language, vision, and reasoning. Now, they’re entering the...

Generative Models in Autonomous Driving: GAIA-1 to GAIA-2 and the Realism Gap
The recent release of GAIA-2 marks a significant leap forward in generative world modeling for autonomous driving. Building on the foundation laid by GAIA-1, GAIA-2 pushes the envelope in realism, control, and temporal consistency. In this post, we dive deep into the technical...

MATT3R and DIMO Join Forces to Boost Rewards for Tesla Owners
Today, MATT3R is excited to announce its partnership with the DIMO Foundation, creating a seamless way for Tesla owners to earn boosted rewards through MATT3R’s K3Y™ device and DIMO’s data-sharing platform. By enabling the DIMO extension within MATT3R’s app for...